科幻情節已成日常
達文西機械手臂,是當代醫療科技的代表之一。在身體表面開幾個小洞,讓機械手臂伸入體內進行手術,在幾十年前仍是天馬行空的想像,只出現在科幻作品之中。如今則是中大型醫院的重要裝備,成為日常執行的術式,病人詢問度和接受度越來越高。
達文西並非第一套臨床應用的機械手臂系統。1997年,宙斯 (Zeus) 系統問世,但是達文西緊接著於1998年上巿,開始激烈的競爭,五年之內後來居上,結果是贏者全拿。二十年來,達文西系統持續進步,且順應微創手術的潮流,也開發出最新的單孔系列機種 (SP series), 相信很快又將掀起下一波熱潮,成為各醫院軍備競賽的必要項目。
機械手臂增進了手術者的能力:視力方面,畫面放大又清晰;體力方面,術者坐在控制台,比傳統手術輕鬆,也避免了姿勢造成的職業傷害;穩定度方面,克服疲勞與手抖問題。有了這些輔助,醫界得以挑戰日益精細的手術,並取得不斷進步的成果。

圖1 Intuitive Surgical's da Vinci SP series.
擴增實境 (augmented reality)
透過攝影機影像的位置及角度精算並加上影像分析技術,讓螢幕上的虛擬世界能夠與現實世界場景進行結合與互動。仔細觀察圖1中的白色機械手臂,就是光源與雙攝影鏡頭,透過雙眼一般的畫面,讓手術者能看到立體影像以利判斷距離。加上擴增實境功能後,經電腦分析影像,標示重要構造,方便使用者辨識,使手術過程更順利安全。隨著電子設備輕量化,運算速度提升,擴充實境越來越普遍,標示準確性高,畫面也越來越流暢。
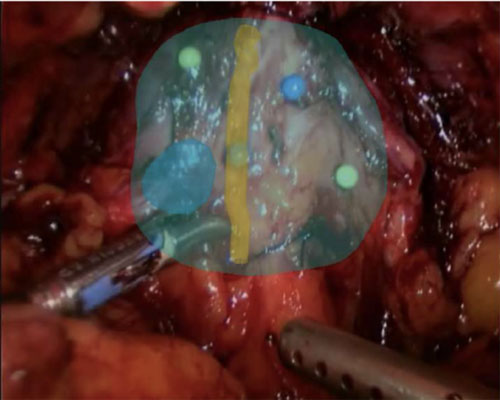
圖2 擴增實境用於腹腔鏡手術
機器學習 (machine learning)
機器人須要指令才能行動,若要自動化,須由人類預先指定編程,如果機器能主動學習就更好,這也是一個熱門的新領域。例如加洲大學柏克來校區 (UC Berkley) 已設立Center for Automation and Learning for Medical Robotics (Cal-MR),即醫用機器人自動化與學習中心。首先將手術過程分解為多個步驟 (segmentation), 其中較為單純的部份以 LBO (learning by observation) 的方式訓練機器人執行。有一個位於華府的團隊已教育其機器人縫合豬小腸,動作比經驗豐富的醫師更迅速精確。
從助手變成主刀者
即使有這麼多進展,機械手臂手術仍是仰賴主刀醫師操作,因此只能算是機械手臂輔助手術。如果機器能在術前分析影像,自動判定手術的標的,並在醫師監督下自動執行手術,就是全自動機器人手術了,這樣的概念目前還有許多技術上的困難需解決,但並非遙不可及。
就像汽車駕駛方式的發展,從手動排檔到自動排檔,再到全自動駕駛。電腦載入正確的地圖與即時的路況資訊,使用者只要指定目的地,汽車就能自動規劃路線,並即時依路況調整。
目前的 IMRT (intensity-modulated radiotherapy) 放射治療儀器,已能依據治療前的影像(等於載入圖資)先模擬治療(規劃路線),由醫師確認治療計劃後執行。治療期間再搭配 IGRT (image-guided radiotherapy) 影像導航功能掌握即時路況,依照最新的腫瘤輪廓修正治療計劃。海福刀 HIFU (high-intensity focused ultrasound) 治療攝護腺癌的過程也已大部份自動化,手術過程中幾乎只要動動滑鼠就好。
在 2018年的 AUA 年會中,幾種新興的半白動手術方式如 TULSA (transurethral ultrasound ablation) 和 AquaBeam 水刀系統都引起關注,這幾種治療方式也是接近自動化手術,醫師只要在影像上指定治療範圍,架設好機器,接下來讓機器跑流程就好。未來的手術中,機器人的角色越來越重要了。 |